
Deformierbare Spiegel
Adaptive Optik Online
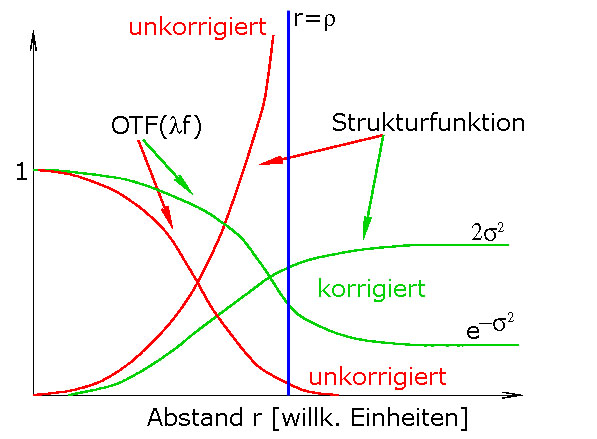
Die optische Übertragungsfunktion, OTF, ist proportional zu (siehe Gl. 6 im vorherigen Kapitel) \( \exp[-0.5D_\phi (\lambda \vec{f}) ] \). Sie fällt in diesem Fall nicht gegen 0 für große Raumfrequenzen f sondern wird konstant auf einem Niveau von
\[ S^* = e^{-\langle\sigma^2\rangle}. \hspace{1cm} (1) \]
Dabei wird S* wird als kohärente Energie bezeichnet.
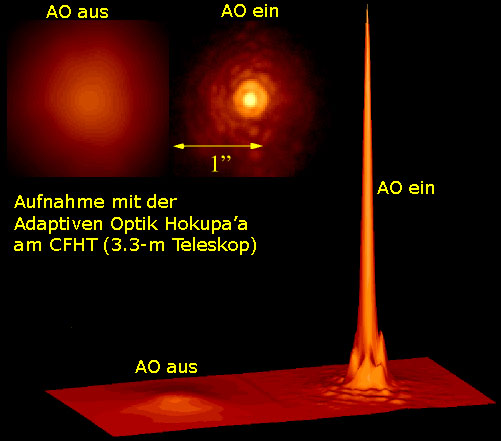
Für große Teleskope mit Spiegeldurchmesser D>>r0, im Beispiel ein 3.3-m Teleskop und ein r0 von 17cm im V-Band, ist das Halo sehr breit im Vergleich zum beugungsbegrenzten Zentralbereich. Die Aufnahmen wurden bei einer Wellenlänge von 0.936µm gemacht. Die Helligkeit des Referenzsterns (SAO 12442) für die Adaptive Optik ist V=9.5. Die am Referenzstern gemessene Halbwertsbreite betrug 0.6 Bogensekunden ohne Adaptive Optik (aus) und 0.068 Bogensekunden mit eingeschalteter Adaptiver Optik (ein). Die entsprechenden Strehlzahlen wurden mit 0.009 und 0.29 bestimmt. Die Integrationszeit betrug jeweils 30 Sekunden.
Mit eingeschalteter Adaptiver Optik dominiert die Zentralintensität die PSF und die Strehl-Zahl S ist in etwa gleich der kohärenten Energie S*. Diese Näherung wird oft benutzt, d.h. die Strehl-Zahl ist äquivalent zur kohärenten Energie, somit also S = S*. Diese Näherung für die Strehl-Zahl wird auch als Maréchal Näherung bezeichnet.
Frage: Die Strehl-Zahl sei bei einer bestimmten Wellenlänge, z.B. 0.5µm, bekannt. Wie berechnet sich daraus die Strehl-Zahl bei einer anderen Wellenlänge, z.B. 2.2 µm?
Es ist wichtig zu beachten, dass die Korrektur großer räumlicher Skalen, insbesondere Tilt, sich auch auf kleine räumliche Skalen auswirkt, da Wellenfrontverkippungen kompensiert und somit flach werden. Übertragen auf die Strukturfunktion bedeutet dies, dass
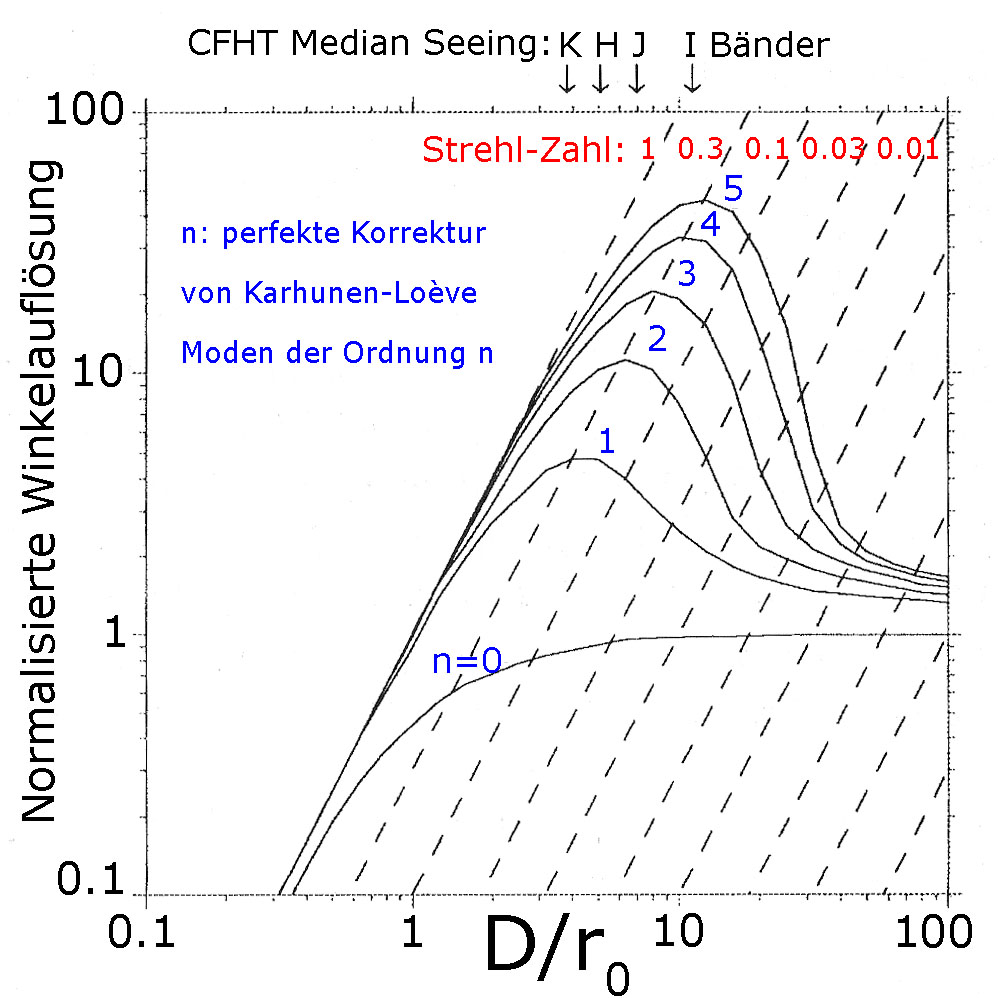
N = (n+1)(n+2)/2 Karhunen-Loève Moden (sehr ähnliche Kurven ergeben sich bei der Verwendung von Zernike Moden). Die gestrichelten Linien sind Linien gleicher Strehl-Zahl.
Die Kurve mit n=0 zeigt den Fall unkorrigierter Bilder. Die Winkelauflösung für kleine \( D/r_0 \) erreicht die Beugungsgrenze; für große \( D/r_0 \) nähert sich die Winkelauflösung asymtotisch dem (auf 1 normierten) Seeing. Die Kurve mit n=1 zeigt den Winkelauflösungsgewinn wenn die Karhunen-Loève Tip- und Tiltmoden perfekt korrigiert werden. Bei n=2 kommen noch die Moden Defokus und Astigmatismus hinzu. Alle Kurven haben ein Maximum bei einer Strehl-Zahl von ca. 0.3. An dieser Stelle ist die Adaptive Optik am effektivsten.
Für das 3.6-m Teleskop CFHT zeigen die Pfeile oben auf den Median Seeingwert für Beobachtungen im K, H, J und I-Band. Für das K-Band ist r0 hier etwas kleiner als 1m, was einem sehr guten Seeing entspricht.
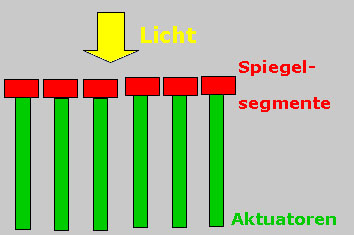
Typische Parameter segmentierter und kontinuierlicher Spiegel mit Piezo-Stack-Aktuatoren:
Anzahl Aktuatoren (nicht Segmente):
Abstand zwischen 2 Aktuatoren:
Aktuatorenanordnung:
Betriebsspannung:
Aktuatorhub:
Resonanzfrequenz:
Kosten:
100 - 1536 (3x512)
2-10 mm
rechteckige oder hexagonale Geometrie
einige 100 Volt
einige Mikrometer
einige kHz
hoch (ca. 1000 € pro Kanal)
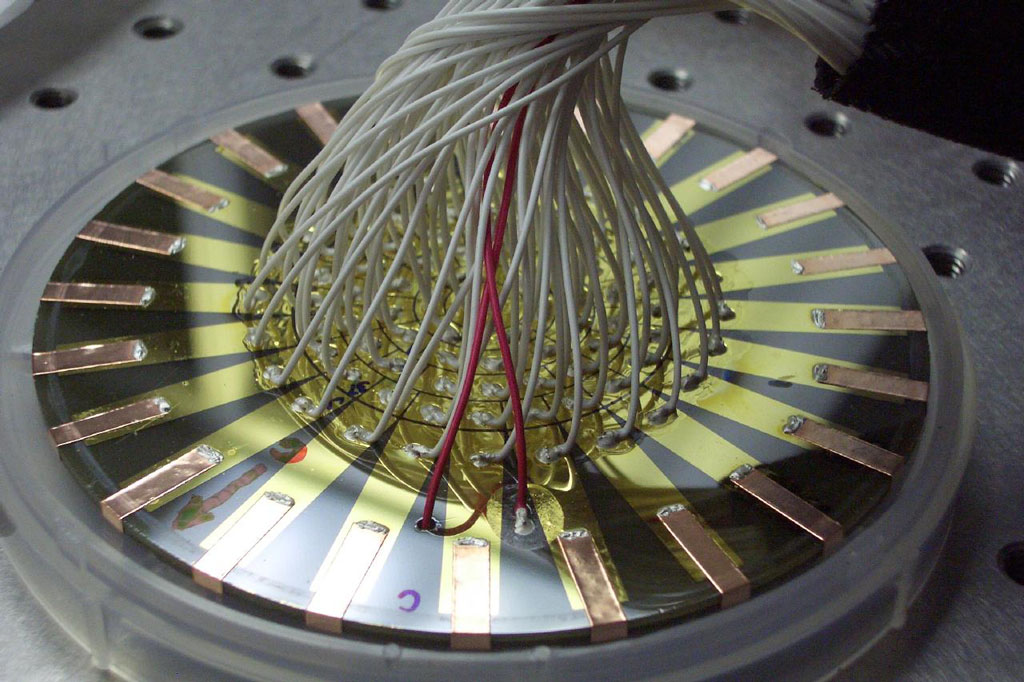
 349-Aktuator Spiegel
349-Aktuator Spiegel
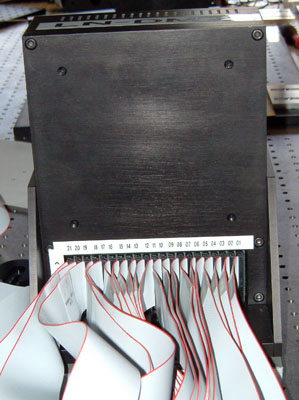 Anschlussseite
Anschlussseite
Zur sicheren Ansteuerung eines solchen Spiegels kann beispielsweise eine Elektronik der Fa. Cambridge Innovations eingesetzt werden (siehe nächstes Bild unten rechts). Diese schaltet zwischen Spiegel und Elektronik noch ein so genanntes TVS (Transition Voltage Suppression) Panel (siehe nächstes Bild unten links), welches den Spiegel vor Kurzschlüssen und zu hohen Spannungsdifferenzen (entsprechend lokal zu hohen mechanischen Belastungen) zwischen benachbarten Aktuatoren schützt.
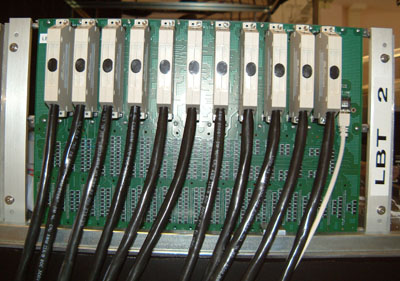
Schutzplatine für einen 349-Aktuator Spiegel

Ansteuerelektronik für einen 349-Aktuator Spiegel
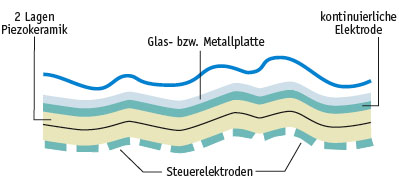
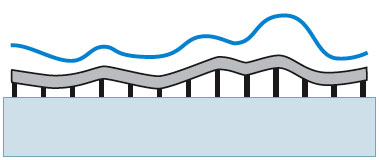
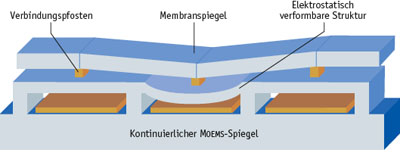
Schematischer Aufbau eines bimorphen Spiegels
{kind=link}
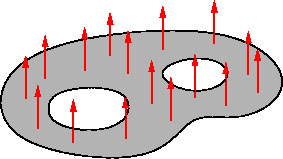
Die Spiegelform als Funktion der an die Elektroden angelegten Spannungen findet man über die Poisson-Gleichung. Diese beschreibt ganz allgemein (siehe unteres Bild) die Deformation einer dünnen Membran auf die Kräfte wirken.
Dieses Verhalten ähnelt stark dem Kolmogorov-Spektrum der Phasenfluktuationen, welche mit f-11/6 fallen. Bimorphe Spiegel sind somit sehr gut geeignet Kolmogorov-ähnliche Turbulenz nachzubilden.
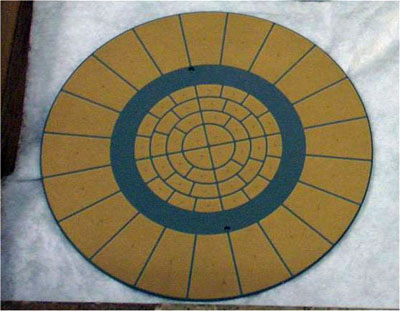
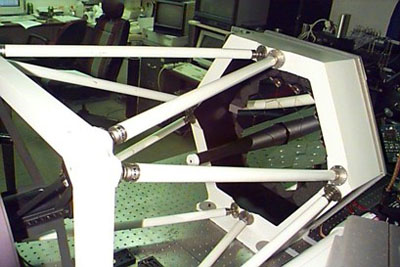
Die mechanische Fixierung eines bimorphen Spiegels ist diffizil: einmal muss er sich biegen können zum anderen muss der Spiegel im gesamten optischen Strahlengang fixiert werden. Dazu kann der Spiegel beispielsweise mit drei V-förmig ausgeschnittenen Halterungen an den Rändern "fixiert" werden.
Bimorphe Spiegel wurden auf Anregung von François Roddier für astronomische Anwendungen entwickelt. Auch als billige Alternative zu Piezostack-Spiegeln. Bimorphe Spiegel werden in den Adaptiven Optiken einiger Teleskope (z.B. CFHT, SUBARU, GEMINI-NORD, ESO-VLTI, ESO-VLT) eingesetzt. Einziger Nachteil ist die im Vergleich zu Piezo-Stack deformierbaren Spiegeln deutlich geringere Zahl der Aktuatoren.
Anzahl Aktuatoren:
Spiegeldurchmesser:
Aktuatorenanordnung:
Betriebsspannung:
Resonanzfrequenz:
Kosten:
13 - 188 (am SUBARU Teleskop)
30 - 200 mm
ringförmig, radial
einige 100 Volt
größer als 500 Hz
moderat
MOEMS werden mit Produktionstechniken** aus der Halbleitertechnologie hergestellt. Ihre Aktuatoren werden über elektrostatische Kräfte bewegt.
Die Abbildung rechts zeigt das Funktionsprinzip. Eine Elektrode wird gegenüber einer Maske aus einzeln ansteuerbaren Elektroden ange-bracht. Die elektrostatische Anziehung und Abstoßung zwischen den Elektroden führt zu Verformungen.
 **Während auf der Oberfläche von Wafern Halbleiter mit Hilfe der Photolithographie gefertigt
werden, werden bei MEMS-spezifischen Verfahren z.B. Opferschichten und Strukturschichten
(sacrificial and structural layers) auf die Wafer aufgebracht und mit Hilfe der Photolithographie
durch selektives entfernen die gewünschten mechanischen Strukturen hergestellt.
Dieses Verfahren wird als Surface Micromachining bezeichnet. MEMS Bauteile haben
oft auch Strukturen auf beiden Seiten des Wafers.
**Während auf der Oberfläche von Wafern Halbleiter mit Hilfe der Photolithographie gefertigt
werden, werden bei MEMS-spezifischen Verfahren z.B. Opferschichten und Strukturschichten
(sacrificial and structural layers) auf die Wafer aufgebracht und mit Hilfe der Photolithographie
durch selektives entfernen die gewünschten mechanischen Strukturen hergestellt.
Dieses Verfahren wird als Surface Micromachining bezeichnet. MEMS Bauteile haben
oft auch Strukturen auf beiden Seiten des Wafers.
Ein erster adaptiver Sekundärspiegel wurde am Arcetri-Observatorium in Florenz entwickelt und im Jahr 2002 erstmals am 6.5-m-MMT-Teleskop auf dem Mount Lemmon in Arizona (USA) in Betrieb genommen. Das Bild rechts zeigt den adaptiven Sekundärspiegel montiert am Frontring des MMT-Teleskops.
Als Aktuatoren werden so genannte Voice-coils (ähnlich Lautspre-cherspulen) eingesetzt, die eine 50 mm dicke Basisplattform mit einer 1.8 mm dünnen, verformbaren, konvexen Glasplatte verbinden (siehe Bild rechts, unten). Zwischen Glasplatte und Basis-plattform befindet sich eine Referenzplatte, in die Löcher eingelassen sind. Darin befinden sich die Spulen-Aktuatoren. Kapazitive Abstandssensoren auf der Referenzplatte halten die Glasplatte, beziehungsweise die darin eingeklebten Magnete, auf dem gewünschten axialen Abstand. Die Luft zwischen Referenz- und Glasplatte wirkt dabei dämpfend. Mit Hilfe der Abstandssensoren und einer Regelschleife wird die Glasplatte unabhängig von der Teleskopstellung immer in der bestmöglichen Grundform gehalten.
Der MMT-Spiegel hat 336 Aktuatoren mit einem Aktuatorhub von etwa 100 Mikrometern und wird von 168 DSPs kontrolliert. Der Abstand zwischen zwei Aktuatoren liegt bei einigen Zentimetern (siehe Abbildung rechts). Damit lassen sich bei den typischen Größen von Sekundärspiegeln bis zu etwa 1000 Aktuatoren realisieren. Für das Large Binocular Telescope wird ein adaptiver Sekundärspiegel mit 672 Aktuatoren zum Einsatz kommen.Die Schwierigkeiten bei der Verwendung dieser Technik liegen einmal mehr bei möglichen Resonanzen zwischen Glasplatte und Aktuatorspulen, zwischen denen sich eine dämpfend wirkende dünne Luftschicht befindet. Nur durch ausgeklügelte Kontrollalgorithmen sind diese Resonanzen kontrollierbar. Weiterhin erreichen die Voice-coils die gewünschte Position erst nach mehr als einer Millisekunde, im Vergleich zu anderen deformierbaren Spiegeltypen recht langsam.
Bisher handelt es sich bei dieser Art Spiegel noch um Einzelstücke, so dass die Kosten dafür sehr hoch sind.
Nach adaptiven Tertiär- und Sekundärspiegeln stellt sich die Frage nach adaptiven Primärspiegeln von Teleskopen. Auch diese gibt es bereits wie am Beispiel des PAMELA Teleskops (siehe Bild unten) demonstriert wurde.

6.5-m MMT-Teleskops in Arizona (USA). (Foto: Laird Close, Steward Observatory, Arizona).
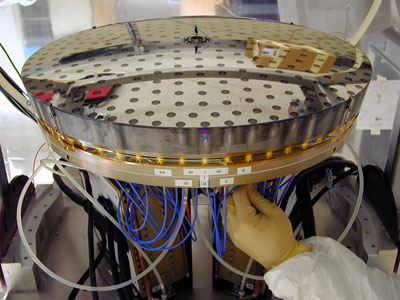
Bild links: das Pamela Teleskop mit adaptivem Primärspiegel bestehend aus 36 hexagonalen Tip-tilt und Piston-Spiegeln mit Voice-coil-Aktuatoren. Link zur englischsprachigen Webseite (Snapshot aus dem Jahr 2013): Pamela Webseite (2013).
Hier soll nun das zeitliche Verhalten einer solchen feedback (closed-loop) Regelschleife etwas genauer analysiert werden.
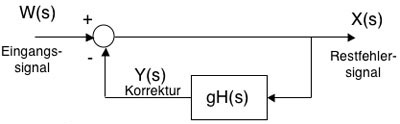
Jeweils Laplace transformiert (siehe Erklärung rechts) bezeichnen hier W(s) das Eingangssignal (z.B. der Koeffizient eines Zernike-Modes), Y(s) das Signal, welches an den deformierbaren Spiegel angelegt wird, und X(s) das Restfehlersignal wie es vom Wellenfrontsensor gemessen wird. Das Restfehlersignal muss durch einen Frequenzfilter H(s) laufen bevor es als Korrektursignal an den deformierbaren Spiegel angelegt wird.
H(s) heisst open-loop Übertragungsfunktion. Open-loop bedeutet in diesem Fall, dass kein Korrektursignal an den deformierbaren Spiegel angelegt wird.
Es gilt: Y(s) = X(s) g H(s) und X(s) = W(s) - Y(s).
Daraus folgt: X(s) = W(s) - g H(s) X(s) und somit: \[ X(s) = \frac{W(s)}{1 + gH(s)} \hspace{1cm} (8) \] und
T(s) = gH(s)/(1+gH(s)) ist die closed-loop Übertragungsfunktion mit Verstärkungsfaktor g. Closed-loop bedeutet hier, dass das gefilterte Korrektursignal an den deformierbaren Spiegel angelegt wird. Im nächsten Zyklus (mit möglichst kleinem zeitlichen Abstand!) wird das aktuelle Eingangssignal mit dem "alten" Korrektursignal (feedback) korrigiert und ein neues Korrektursignal berechnet.
Einige Begriffe und Definitionen aus der Regeltechnik:
Servo: Gerät(e) zur Regelung. Beispiel: Servomotor.
Regelung: Kombination aus Messen und Steuern.
Steuerung: Eingangssignal und Ausgangssignal sind über ein oder mehrere Übertragungsglieder miteinander verbunden.
Open-loop: "Regelung" ohne Rückkopplung (Steuerung).
Closed-loop: Regelung mit Rückkopplung (feedback).
Open-loop Transferfunktion für reinen Integrator: H(s)=1/s.
Closed-loop Transferfunktion (Y(s)/W(s)): gH(s)/(1+gH(s)).
Closed-loop Error Rejection Transferfunktion (X(s)/W(s): 1/(1+gH(s)).
Sensitiviy: anderer Ausdruck für Error Rejection Transferfunktion.
0 dB Servo-Bandbreite in open-loop: für Frequenzen kleiner als die open-loop Bandbreite kann eine Verstärkung >1 (0 dB) angelegt werden. Höhere Frequenzen werden abgeschwächt, so dass keine Korrektur mehr erreicht werden kann.
0 dB Servo-Bandbreite der Fehlerunterdrückung (Error rejection) in closed-loop: für Frequenzen kleiner als diese Bandbreite werden Störungen unterdrückt. Für höhere Frequenzen werden Störungen erst verstärkt!!! und für noch höhere Frequenzen passiert dann nichts mehr.
-3 dB Servo-Bandbreite in closed-loop: definiert als die Frequenz bei der das Ausgangssignal X (oder die Verstärkung) auf die Hälfte des Wertes bei der Frequenz 0 gefallen ist. Dies ist die höchste definierte Bandbreite in Servoregelungen.
Bode Diagramm: graphische Darstellung einer komplexen Transfer-funktion. Ein Graph zeigt den Betrag der Transferfunktion (Gain) in Dezibel als Funktion der Frequenz, der andere den komplexen Wert der Transferfunktion (Phase) als Funktion der Frequenz. Die Frequenz-Achse ist dabei immer logarithmisch aufgetragen. Da Dezibel eine logarithmische Einheit ist, ist der Gain gegen Frequenz Graph doppellogarithmisch aufgetragen.
Beachte:
W(s), Y(s), X(s): Laplace Transformierte der Signale w(t), y(t), x(t)
\[ x(t) = g \int_{\tau=0}^{\tau=t} w(\tau)d\tau + x_0 \sigma(t) = x_1(t) + x_0 \hspace{1cm} (10) \] mit x0 als Anfangswert zur Zeit t=0. Die Stufenfunktion \( \sigma \) wirkt als Integrator auf das Eingangssignal, sie ist \( \sigma \)=0 für t<0 und \( \sigma \)=1 in allen anderen Fällen.
Laplace transformiert erhält man
X1(s) = gW(s)/s = gH(s)W(s) (11)
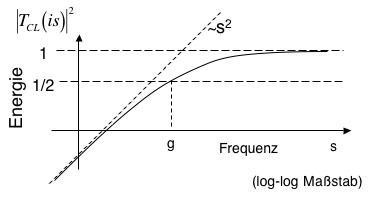
X(s) = W(s) / (1+g/s) = sW(s) / (s+g) = TCLW(s) (12)
TCL = s / (s+g) gegen 1 (Hochpassfilter) und im statischen Fall (is=0) gegen 0. Der Übergang vom Verhalten bei niedrigen Frequenzen zum Verhalten bei hohen Frequenzen liegt bei s=g. Die Unterdrückung der Signalenergie (power rejection) ist an dieser Stelle: \[ | T_{CL}(ig)|^2 = \frac{ig}{g+ig} \cdot \frac{-ig}{g-ig} = \frac{g^2}{2g^2} = \frac{1}{2} \hspace{1cm} (13) \] Beachte: Das Amplitudenquadrat einer elektromagnetischen Welle ist proportional zu dessen Energie.
Diese Frequenz s=g wird oft als Half-Power Frequenz bezeichnet. Betrachtet man nicht die Energie sondern nur den Betrag des Amplitudensignals, wird dieses an der Stelle s=g um den Faktor \( 1/\sqrt{2} \) = 1/1.41= 0.71 unterdrückt. Der Faktor 1.41 entspricht 3 dB, eine in der Signalverarbeitung (Nachrichtentechnik) gebräuchliche Angabe von Pegeln. Entsprechend wird die Frequenz is=g sehr oft auch mit f3dB bzw. als 3 dB Bandbreite bezeichnet, d.h. bis zu dieser Frequenz werden alle Eingangspegel um mindestens die Hälfte unterdrückt.
Beispiele für typische closed-loop Transferfunktionen Y/W und X/W adaptiver Optiken sind in den beiden untenstehenden Bildern gezeigt. Das rechte Bild, die Error Rejection Transferfunktion X/W, zeigt sehr anschaulich wie alle Störungen bis zu einer Frequenz von ca. 7 Hz unterdrückt werden. Störungen höherer Frequenz werden dann sogar verstärkt. Die 0 db Bandbreite liegt be ca. 7 Hz.
Im linken Bild ist die closed-loop Transferfunktion X/W als Funktion der Frequenz aufgetragen. Um die Stabilität der Regelschleife nicht zu gefährden, muss das Übersteuern (Gain > 0 dB) möglichst gering gehalten werden. Die -3 dB Bandbreite liegt bei ca. 18 Hz.
Beiden Graphen wurden für die Adaptive Optik Come-On berechnet, das erste (zivile) astronomische Adaptive Optik System, welches Anfang der 1990er Jahre auf dem La Silla Observatorium der ESO in Betrieb genommen wurde.
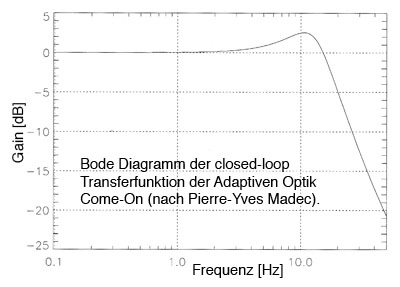 Gain (Y(s) / W(s)) der closed-loop Transferfunktion der Adaptiven Optik Come-On
(aus Roddier-Buch 1. Auflage, Seite 143).
Gain (Y(s) / W(s)) der closed-loop Transferfunktion der Adaptiven Optik Come-On
(aus Roddier-Buch 1. Auflage, Seite 143).
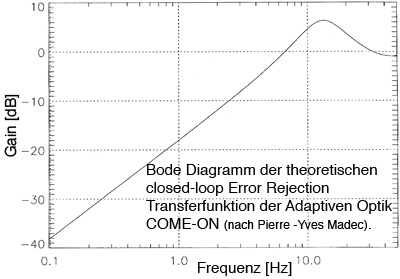 Gain (X(s) / W(s)) der Error Rejection Transferfunktion der Adaptiven Optik Come-On
(aus Roddier-Buch 1. Auflage, Seite 144).
Gain (X(s) / W(s)) der Error Rejection Transferfunktion der Adaptiven Optik Come-On
(aus Roddier-Buch 1. Auflage, Seite 144).
1. Die Reaktionszeit des gesamten Systems. Die Messung der Wellenfront mit dem Wellenfrontsensor dauert eine bestimmte Zeit. Aus den Messdaten muss die Wellenfront rekonstruiert werden. Auch dies verbraucht Computerzeit. Ist die Wellenfront bestimmt wird daraus ein Korrektursignal für den deformierbaren Spiegel berechnet und an den Spiegel angelegt. Der Spiegel selbst braucht eine gewisse Zeit um die angelegten Spannungen in Verformungen umzusetzen. Im System gibt es somit einfache Verzögerungen (delays) als auch langsame Änderungen (lags) hin zum gewünschten Endzustand (Aktuator dehnt sich "langsam" aus). Je höher die zu kontrollierenden Frequenzen sind, um so kritischer wird die Reaktionszeit. Im Extremfall werden die Störungen nur noch verstärkt und das System wird instabil.
2. Rauschquellen. Schon die Messung der Wellenfront ist mit einem Fehler behaftet. In Abhängigkeit von der Helligkeit des Leitsterns der Adaptiven Optik und der Auslesegeschwindigkeit des
Digitale Servo-Kontroller tasten Signale nicht kontinuierlich sondern nur mit einer bestimmten Frequenz, der Schleifenfrequenz (loop frequency), ab. Solche digitalen Kontroller müssen in der Praxis deutlich schneller sein als das Nyquist-Shannon-Abtasttheorem sagt. Für die adaptive Optik gilt, dass die Schleifenfrequenz etwa 10-15fach höher sein muss als die 0 dB Servo-Bandbreite der Fehlerunterdrückung (siehe oben).
Frage: Falls die closed-loop Bandbreite halbiert werden soll, wie muss dazu der Verstärkungsfaktor im Kontrollsystem mit einem Integratorglied geändert werden?
Frage: Um welchen Faktor wird eine statische Störung/Aberration reduziert wenn eine Kontrollsystem mit einem Integratorglied eingesetzt wird?
Frage: Versuche die closed-loop Error Rejection Transferfunktion zu berechnen für einen Integrator mit Verzögerung. Was lässt sich über die Stabilität der Kontrollschleife sagen?
Der räumliche Fehler lässt sich durch den als konstant angenommenen Abstand zwischen zwei Aktuatoren d bestimmen. Dieser so genannte Fitting-Fehler der Phasenvarianz ist:
\[ \sigma_{fit}^2 = k \left ( d/r_0 \right )^{5/3} \hspace{1cm} (14) \]
mit dem Friedparameter r0 und einem vom Spiegeltyp abhängigen Faktor k. Für kontinuierliche Piezo-Stack Spiegel ist k=0.3. Die Gesamtzahl kontrollierter Aktuatoren in einem Teleskop mit Spiegeldurchmesser D ist proportional zu N = (D/d)2. Damit ergibt sich der Fitting-Fehler zu:
\[ \sigma_{fit}^2 = k \left ( D/r_0 \right )^{5/3} N^{-5/6} \hspace{1cm} (15) \] Könnte der deformierbare Spiegel N Zernike-Moden exakt darstellen, wäre der Fitting-Fehler durch die asymtotische Noll-Formel entsprechend Gl. 20 aus dem vorherigen Kapitel bestimmt.
Der Exponent in Nolls Formel ist \( -\sqrt{3}/2 \approx -0.866 \), verglichen mit -5/6 = 0.833 aus Gl. (15) keine sehr große Abweichung. Für große N ist eine Korrektur mit Zernike-Moden aber besser als eine lokale Korrektur über einzelne Aktuatoren. Dies ist mit ein Grund für die größere Effizienz bimorpher Spiegel im Vergleich zu Piezo-Stack Spiegeln. Bimorphe Spiegel können Zernike-Moden exakter darstellen bzw. reproduzieren.
Tatsächlich hängt das zeitliche Spektrum der Zernike-Koeffizienten von der Ordnung des Zernike-Modes ab: Moden niedriger Ordnung ändern sich zeitlich langsamer als Moden höherer Ordnung. Es wäre also vernünftig, jeden Mode mit einer eigenen Antwortzeit zu kontrollieren um so den verbleibenden Phasenfehler zu optimieren bzw. zu minimieren; insbesondere wenn die Wellenfrontmessung hohe Rauschanteile hat. Viele Adaptive Optiken in der Astronomie benutzen eine Modenkontrolle; neben Zernike- und Karhunen-Loève Moden werden auch an die Hardware angepasste Moden (Spiegelmoden) verwendet.
Frage: Wenn allein die Regelbandbreite der Regelschleife betrachtet wird und bei einer atmosphärischen Zeitkonstanten von \( \tau_0 \) =4 ms eine Strehl-Zahl von 0.9 erreicht werden soll, wie hoch muss f3 dB sein?
Frage: Für ein 8-m Teleskop und einem Seeing von 1 Bogensekunde, berechne die Anzahl der Piezo-Stack-Aktuatoren um eine Strehl-Zahl von 0.37 bei einer Wellenlänge von 0.5 µm zu erhalten. Wieviele Zernike-Moden müssen kompensiert werden um die gleiche Strehl-Zahl zu erhalten?